

近年来,历史信息记忆在多体系统智能协同中的调控作用已成为跨学科研究的前沿热点。理解历史交互如何塑造集体行为,不仅对于揭示生物系统(如神经网络、细胞组织)中的微观信息处理与宏观表型映射机制至关重要,也为设计下一代具备自适应能力的自主协作集群系统(如无人机编队、智能活性材料)提供了关键理论支撑。然而,在物理实验中构建可控的“信息记忆网络”,并以此精确调控群体的自组织行为,仍是该领域面临的核心挑战。针对上述难题,本研究利用自主研发的二维气浮台集群机器人系统,突破了传统活性物质仅依赖瞬时物理力的局限,构建了一个由“感知-记忆-决策”闭环驱动的智能集群模型,在实验上证实了内部信息记忆作为一种物理自由度,能够独立驱动群体产生非平衡态的自组织行为。
复旦大学人类表型组研究院刘雳宇团队联合普林斯顿大学Robert H. Austin团队在Physical Review Letters (IF:9.0)上发表题为“Informational Memory Shapes Collective Behavior in Intelligent Swarms”的研究论文。
复旦大学人类表型组研究院刘雳宇教授、普林斯顿大学Robert H. Austin教授与李圣恺博士为本文的共同通讯作者。复旦大学人类表型组研究院为本文的通讯单位。本研究获得了国家自然科学基金委(项目号T2350007、12404239、12174041)的资助。
研究团队设计了一种搭载微处理器、陀螺仪与加速度计的微型自旋机器人。这些机器人不仅通过物理碰撞产生局部机械耦合,更具备由记忆构建与信息处理组成的独特内部计算能力。研究发现,通过调节个体的记忆深度和决策算法,集群系统能够形成多种由信息反馈驱动的集体动力学行为,展现出显著的非互易相互作用与记忆诱导相变现象,例如从无序到有序的自发对称性破缺,以及复杂的混沌状态切换。通过建立物理-信息耦合理论框架,研究团队将集体动力学映射到由信息反馈塑造的有效势能景观中,揭示了记忆信息在集群自组织行为中的核心驱动效应。这项工作不仅为理解智能活性系统中的“物理-信息”耦合现象提供了量化框架,更在实验层面确立了记忆作为物理自由度的地位。该成果将为设计具备学习与适应能力的无人机集群、可编程智能机器人材料,以及模拟具有记忆调控能力的生物分子自组装过程与复杂社会-技术网络中的信息传播与极化现象提供重要的实验模型与理论指导。
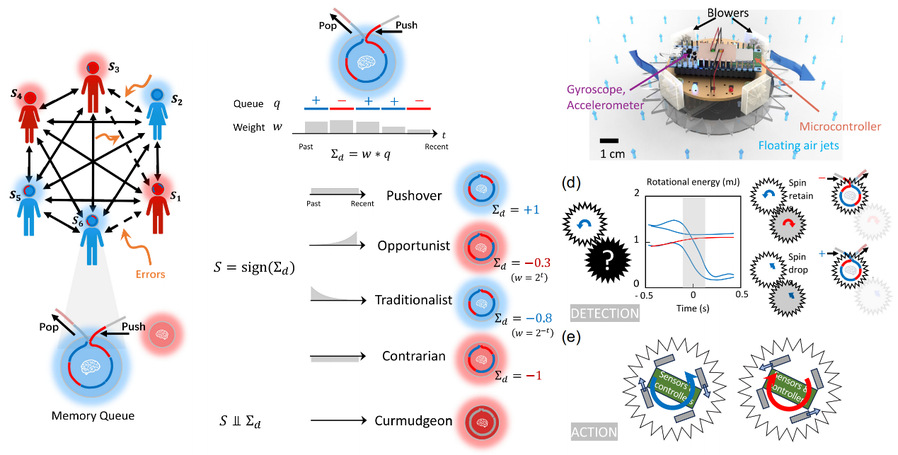
集群机器人基于历史碰撞记忆
实现对行为状态的动态调控
论文链接(点击阅读原文即可跳转):
https://doi.org/10.1103/rt97-ncmf



